7.1 KiB
EuRoC dataset
We demonstrate the usage of the system with the MH_05_difficult sequence of the EuRoC dataset as an example.
Note: The path to calibration and configuration files used here works for the APT installation. If you compile from source specify the appropriate path to the files in data folder.
Download the sequence from the dataset and extract it.
mkdir euroc_data
cd euroc_data
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_05_difficult/MH_05_difficult.zip
mkdir MH_05_difficult
cd MH_05_difficult
unzip ../MH_05_difficult.zip
cd ../
Visual-inertial odometry
To run the visual-inertial odometry execute the following command in euroc_data folder where you downloaded the dataset.
basalt_vio --dataset-path MH_05_difficult/ --cam-calib /usr/etc/basalt/euroc_ds_calib.json --dataset-type euroc --config-path /usr/etc/basalt/euroc_config.json --marg-data euroc_marg_data --show-gui 1
The command line options have the following meaning:
--dataset-pathpath to the dataset.--dataset-typetype of the datset. Currently onlybagandeurocformats of the datasets are supported.--cam-calibpath to camera calibration file. Check calibration instructions to see how the calibration was generated.--config-pathpath to the configuration file.--marg-datafolder where the data from keyframe marginalization will be stored. This data can be later used for visual-inertial mapping.--show-guienables or disables GUI.
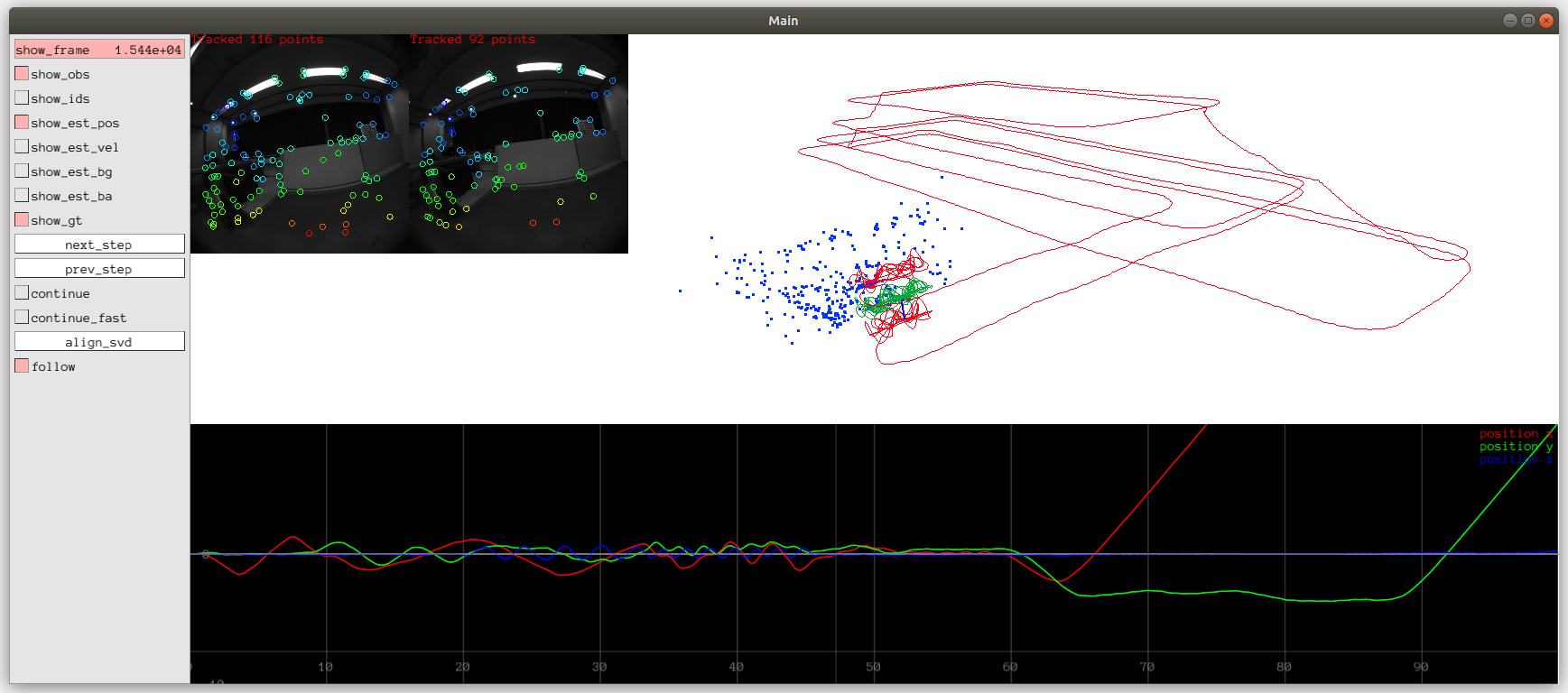
This opens the GUI and runs the sequence. The processing happens in the background as fast as possible, and the visualization results are saved in the GUI and can be analysed offline.
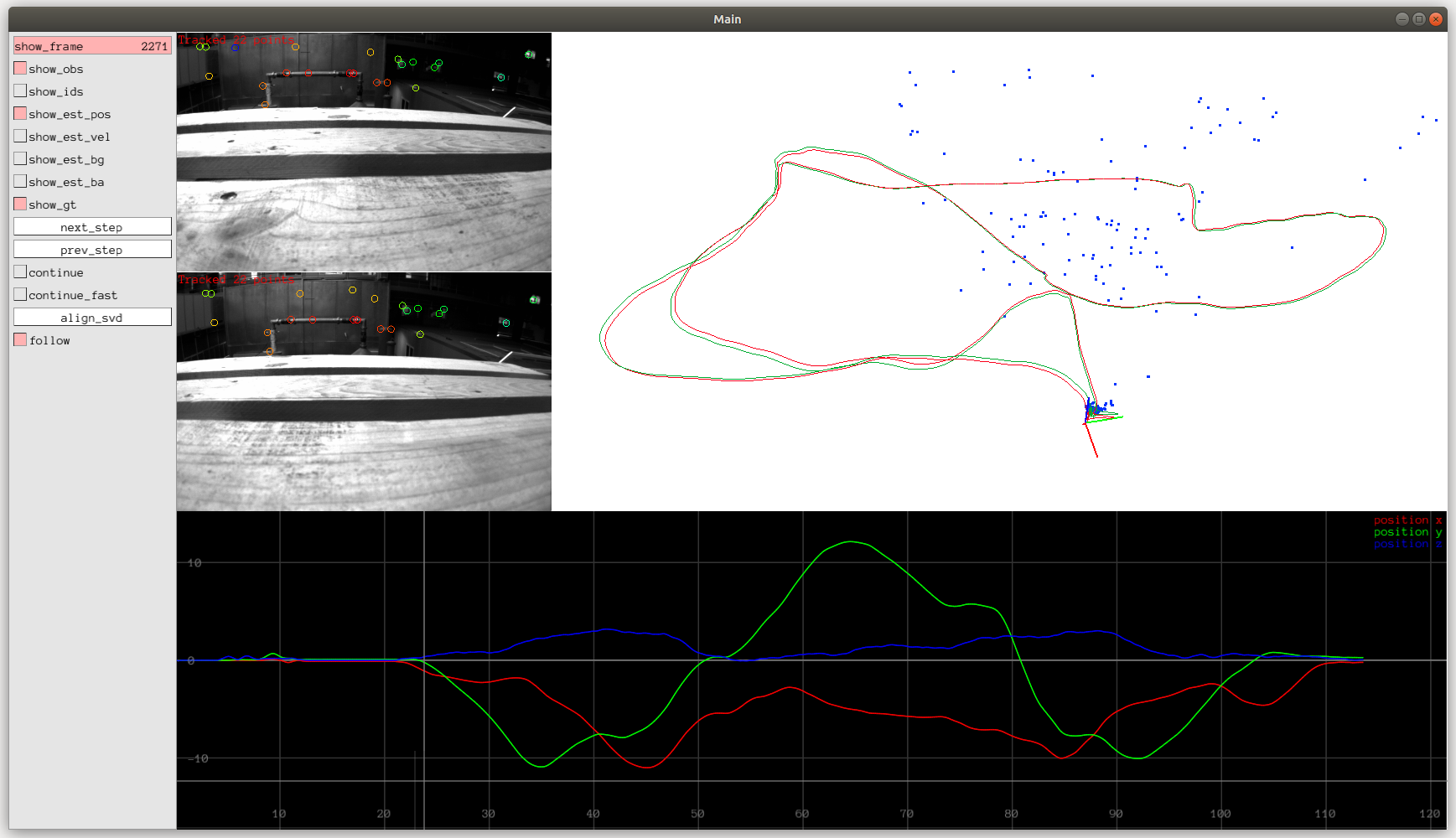
The buttons in the GUI have the following meaning:
show_obstoggles the visibility of the tracked landmarks in the image view.show_idstoggles the IDs of the points.show_est_posshows the plot of the estimated position.show_est_velshows the plot of the estimated velocity.show_est_bgshows the plot of the estimated gyro bias.show_est_bashows the plot of the estimated accel bias.show_gtshows ground-truth trajectory in the 3D view.
By default the system starts with continue_fast enabled. This option visualizes the latest processed frame until the end of the sequence. Alternatively, the continue visualizes every frame without skipping. If both options are disabled the system shows the frame that is selected with the show_frame slider and the user can move forward and backward with next_step and prev_step buttons. The follow button changes between the static camera and the camera attached to the current frame.
For evaluation the button align_se3 is used. It aligns the GT trajectory with the current estimate using an SE(3) transformation and prints the transformation and the root-mean-squared absolute trajectory error (RMS ATE).
The button save_traj saves the trajectory in one of two formats (euroc_fmt or tum_rgbd_fmt). In EuRoC format each pose is a line in the file and has the following format timestamp[ns],tx,ty,tz,qw,qx,qy,qz. TUM RBG-D can be used with TUM RGB-D or UZH trajectory evaluation tools and has the following format timestamp[s] tx ty tz qx qy qz qw.
Visual-inertial mapping
To run the mapping tool execute the following command:
basalt_mapper --cam-calib /usr/etc/basalt/euroc_ds_calib.json --marg-data euroc_marg_data
Here --marg-data is the folder with the results from VIO.
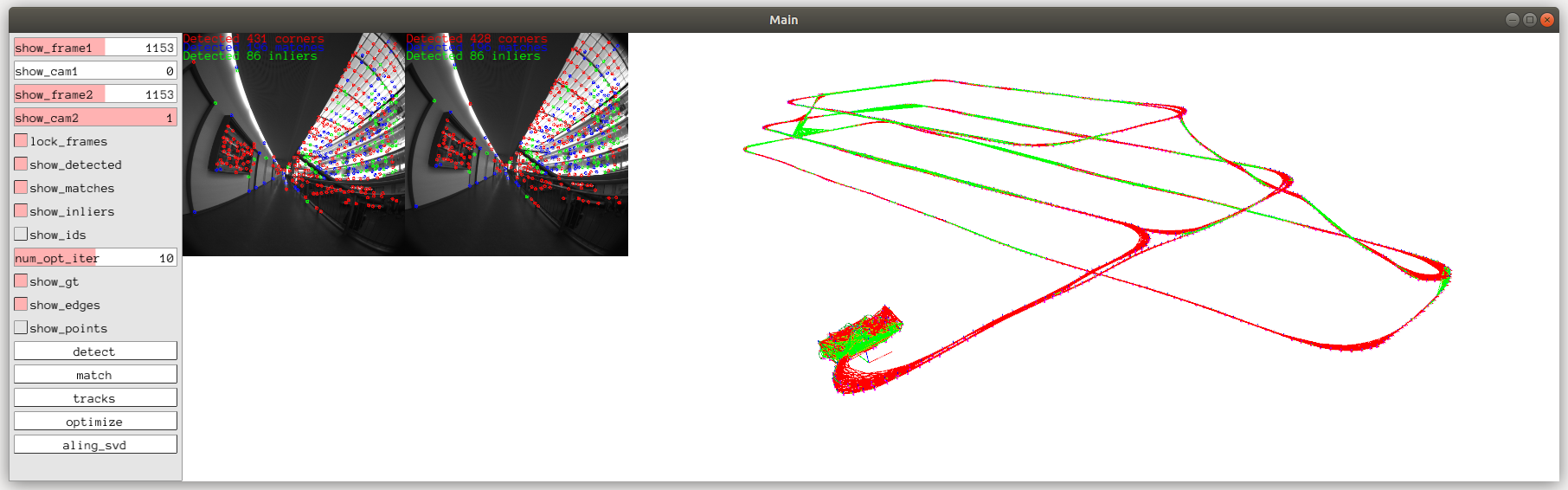
This opens the GUI and extracts non-linear factors from the marginalization data.
The buttons in the GUI have the following meaning:
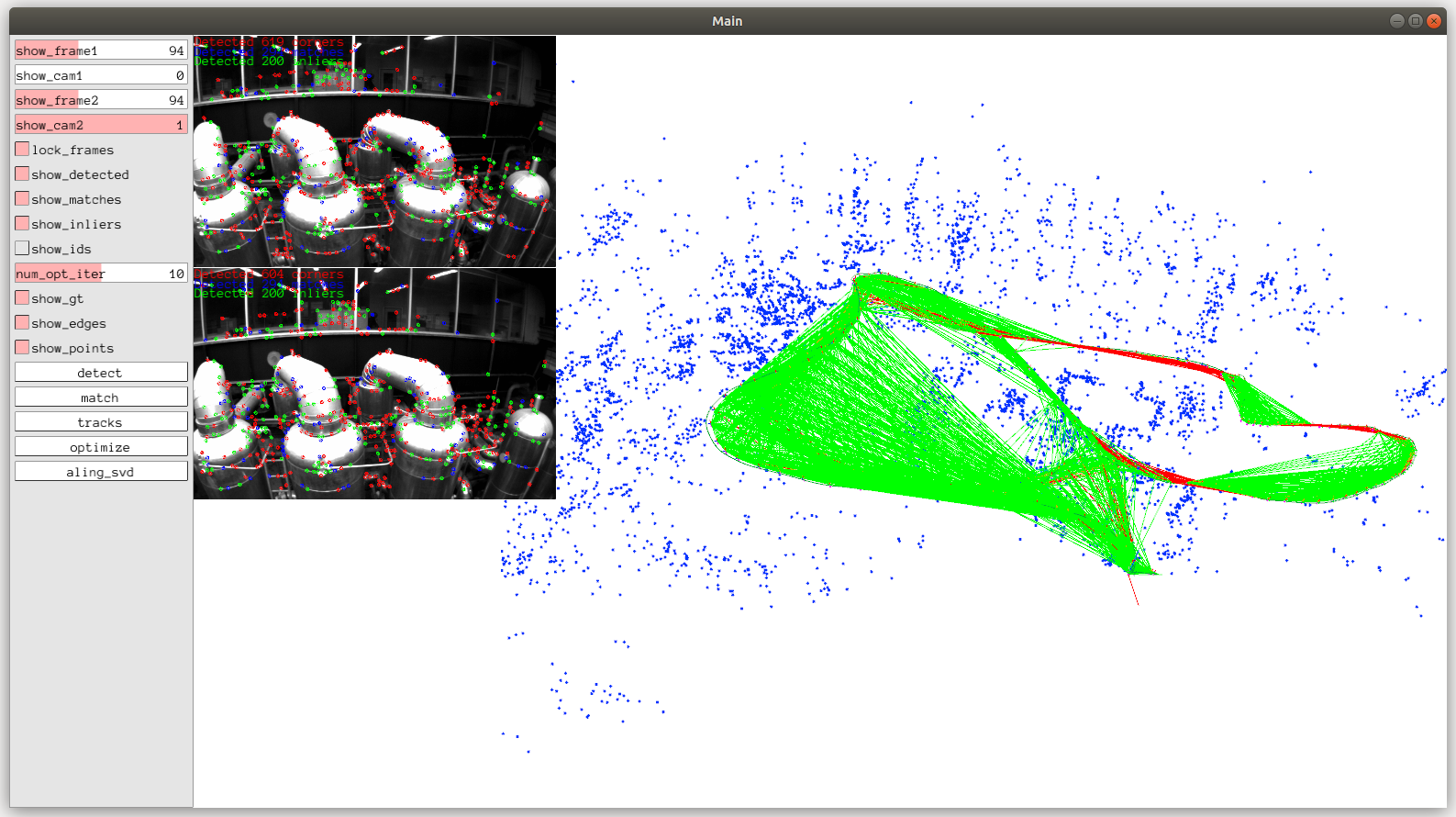
show_frame1,show_cam1,show_frame2,show_cam2allows you to assign images to image view 1 and 2 from different timestamps and cameras.show_detectedshows the detected keypoints in the image view window.show_matchesshows feature matching results.show_inliersshows inlier matches after geometric verification.show_idsprints point IDs. Can be used to find the same point in two views to check matches and inliers.show_gtshows the ground-truth trajectory.show_edgesshows the edges from the factors. Relative-pose factors in red, roll-pitch factors in magenta and bundle adjustment co-visibility edges in green.show_pointsshows 3D landmarks.
The workflow for the mapping is the following:
detectdetect the keypoints in the keyframe images.matchrun the geometric 2D to 2D matching between image frames.tracksbuild tracks from 2D matches and triangulate the points.optimizerun the optimization.align_se3align ground-truth trajectory in SE(3) and print the transformation and the error.
The num_opt_iter slider controls the maximum number of iterations executed when pressing optimize.
The button save_traj works similar to the VIO, but saves the keyframe trajectory (subset of frames).
For more systematic evaluation see the evaluation scripts in the scripts/eval_full folder.
NOTE: It appears that only the datasets in ASL Dataset Format (euroc dataset type in our notation) contain ground truth that is time-aligned to the IMU and camera images. It is located in the state_groundtruth_estimate0 folder. Bag files have raw Mocap measurements that are not time aligned and should not be used for evaluations.
Optical Flow
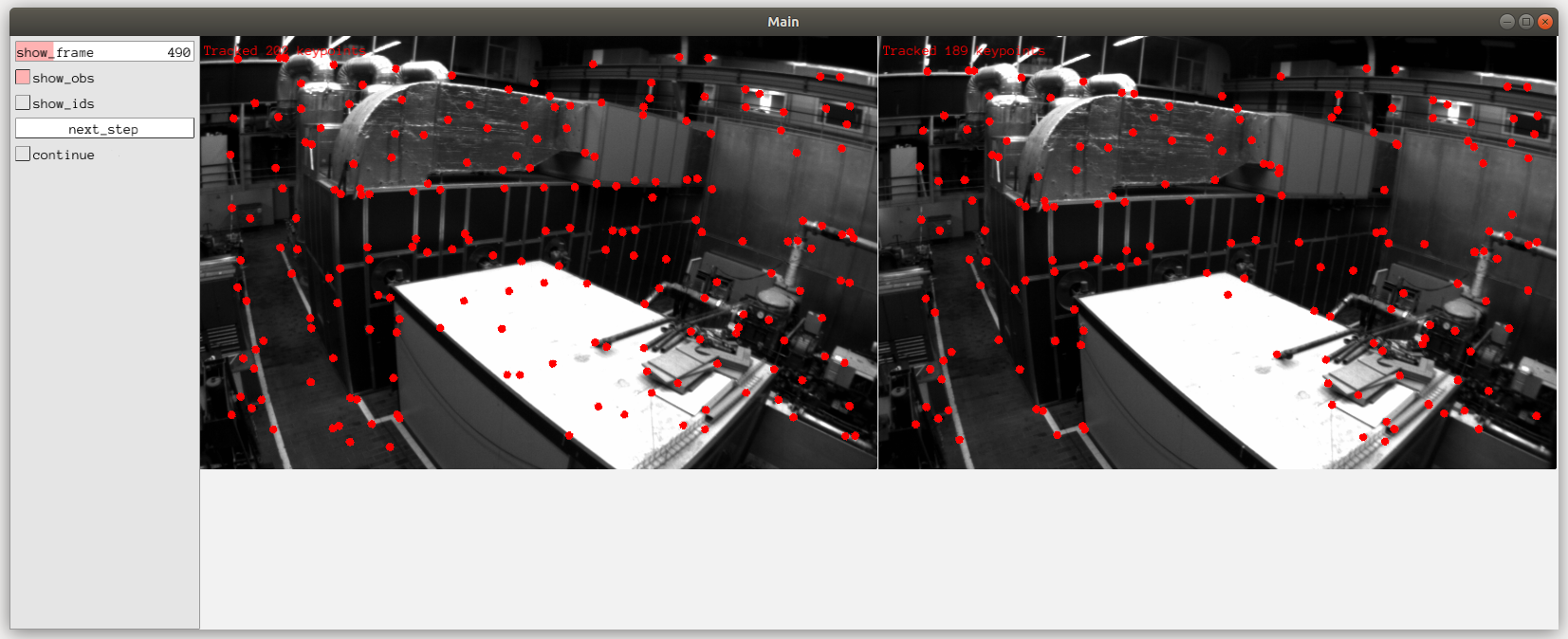
The visual-inertial odometry relies on the optical flow results. To enable a better analysis of the system we also provide a separate optical flow executable
basalt_opt_flow --dataset-path MH_05_difficult/ --cam-calib /usr/etc/basalt/euroc_ds_calib.json --dataset-type euroc --config-path /usr/etc/basalt/euroc_config.json --show-gui 1
This will run the GUI and print an average track length after the dataset is processed.
TUM-VI dataset
We demonstrate the usage of the system with the magistrale1 sequence of the TUM-VI dataset as an example.
Download the sequence from the dataset and extract it.
mkdir tumvi_data
cd tumvi_data
wget http://vision.in.tum.de/tumvi/exported/euroc/512_16/dataset-magistrale1_512_16.tar
tar -xvf dataset-magistrale1_512_16.tar
Visual-inertial odometry
To run the visual-inertial odometry execute the following command in tumvi_data folder where you downloaded the dataset.
basalt_vio --dataset-path dataset-magistrale1_512_16/ --cam-calib /usr/etc/basalt/tumvi_512_ds_calib.json --dataset-type euroc --config-path /usr/etc/basalt/tumvi_512_config.json --marg-data tumvi_marg_data --show-gui 1
Visual-inertial mapping
To run the mapping tool execute the following command:
basalt_mapper --cam-calib /usr/etc/basalt/tumvi_512_ds_calib.json --marg-data tumvi_marg_data